 |
The Autonomous Mobile Robot GroupDepartment of Computer ScienceNorthwestern University |
||
Final Projects
|
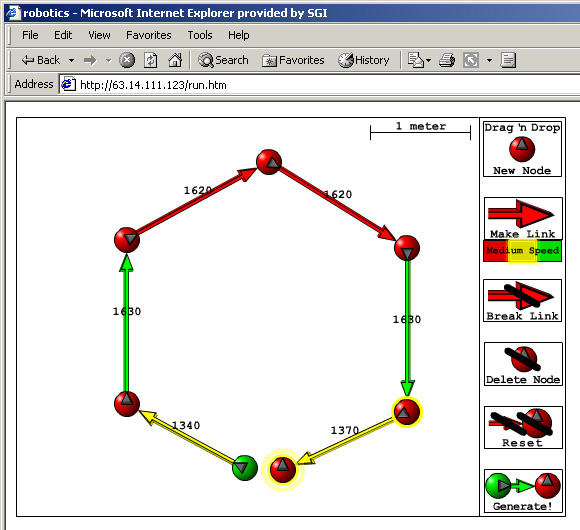
Flash-enabled GRL interfaceAlan Kendall This project is a GUI intended to allow somebody who knows nothing about GRL code to move the robot along some path. It was created in Flash so that it could be platform-independent and visually appealing. A user can drag n' drop "nodes" (key points) into the path builder area. When two nodes are selected (by clicking on them) the user can click "Make Link" to create a directional path (a "link") between them. Three speeds for the robot are available, and are indicated in the GUI as red, yellow, and green links. The GUI also takes care of error checking during the building process, so that you can never create an impossible path (for example, a path that loops back onto itself). The "Generate" button sends the information in the Flash GUI to a robust Perl script that outputs the equivalent GRL code to a .scm file. When loaded and run on the robot, the robot will follow the path explicitly using only odometry and plans. This has worked quite consistently. Valid Paths - GRL generated successfullyTravelling in a hexagonal shapeClick here to see the code generated for this path.
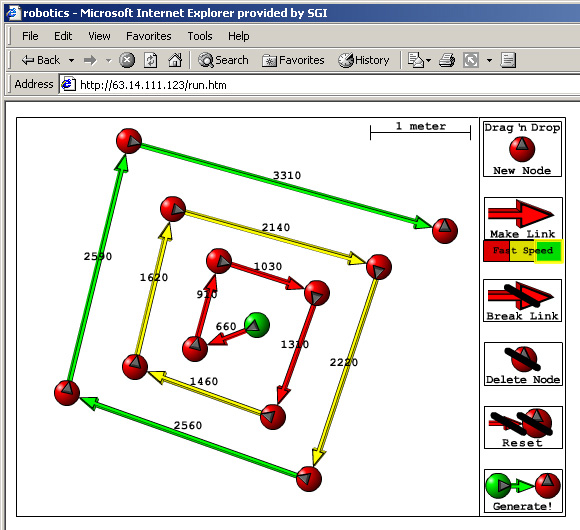
Travelling in a spiral patternClick here to see the code generated for this path.
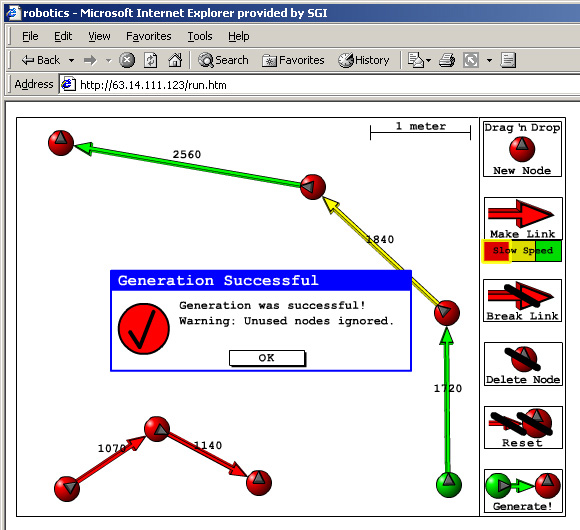
Valid path with errors
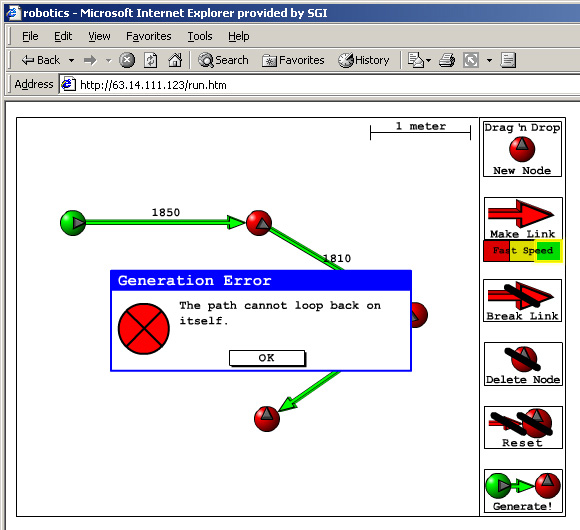
Invalid path
|
||
|
|
AMRG home |
||