Summary:
I expected this project to be quite a bit of work. And it hasn't disappointed me yet. Fortunately, this week I managed to put in a lot of time, and it's beginning to pay off.- The base genetic programming engine is basically finished
now. (There may be a few things I have to tweak along the way,
but hopefully not.)
- Cloning, mutation, and crossover are fully implemented,
with sliders to control the frequency of each type of operation.
- Generations occur, and a fitness function is calculated.
- I succeeded in making it fairly modular, so that it shouldn't be hard to adapt it for all sorts of different models.
- The maze marcher model is starting to come together
now. (A picture of a beta run is shown at right).
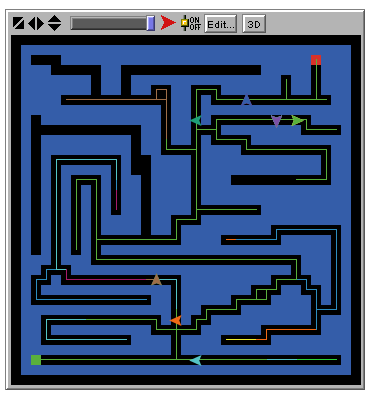
(Maze
marchers try to find the goal!)